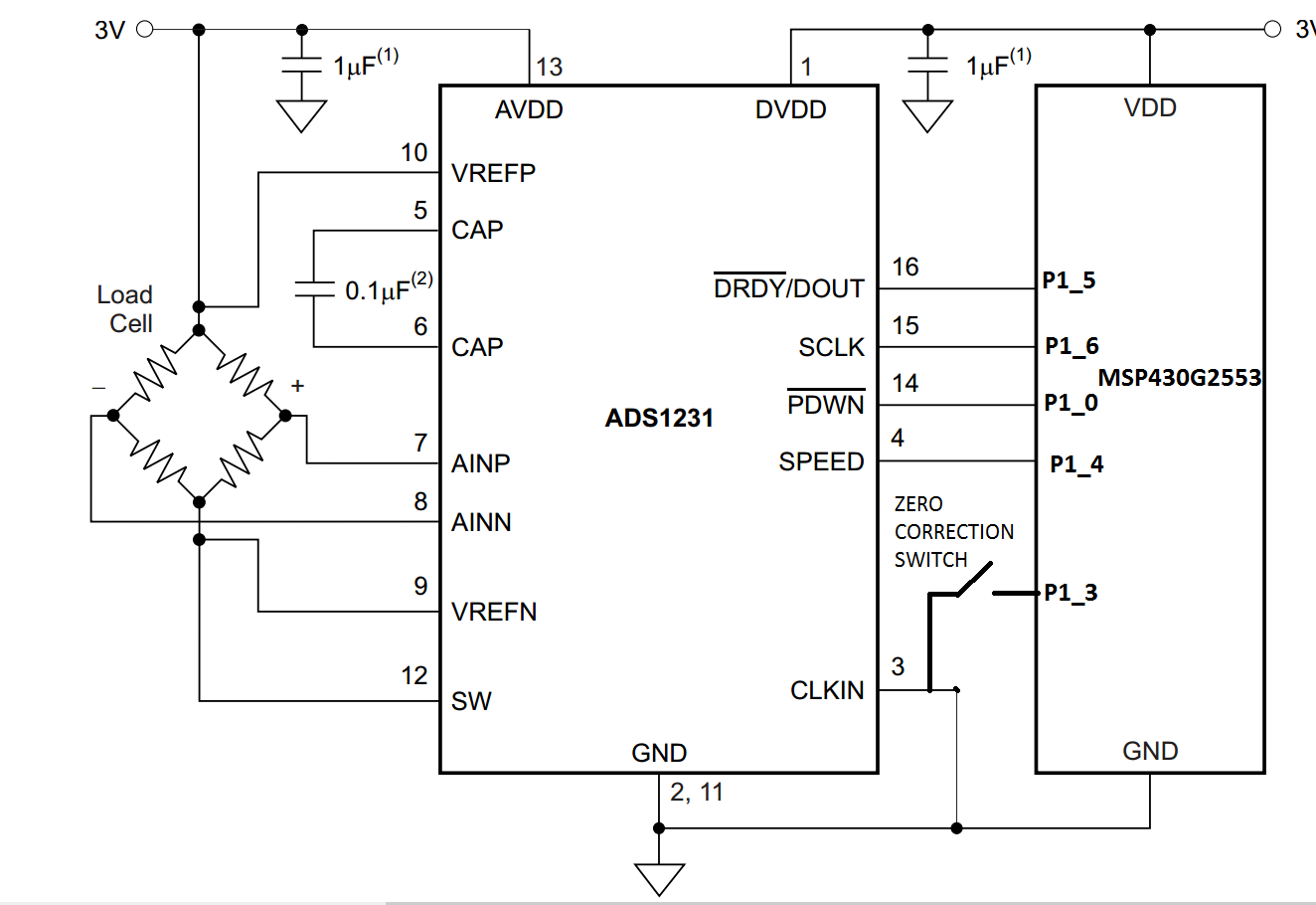
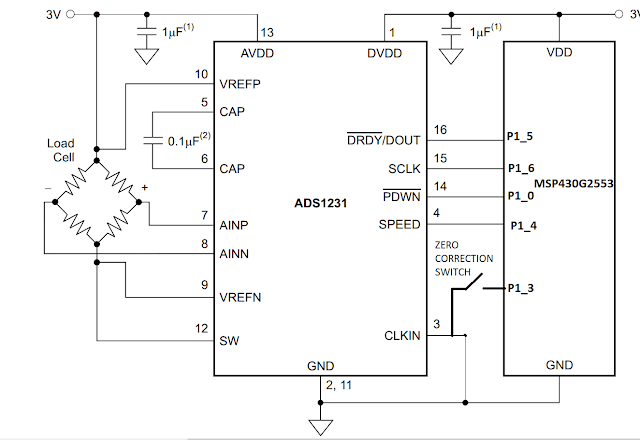
CIRCUIT
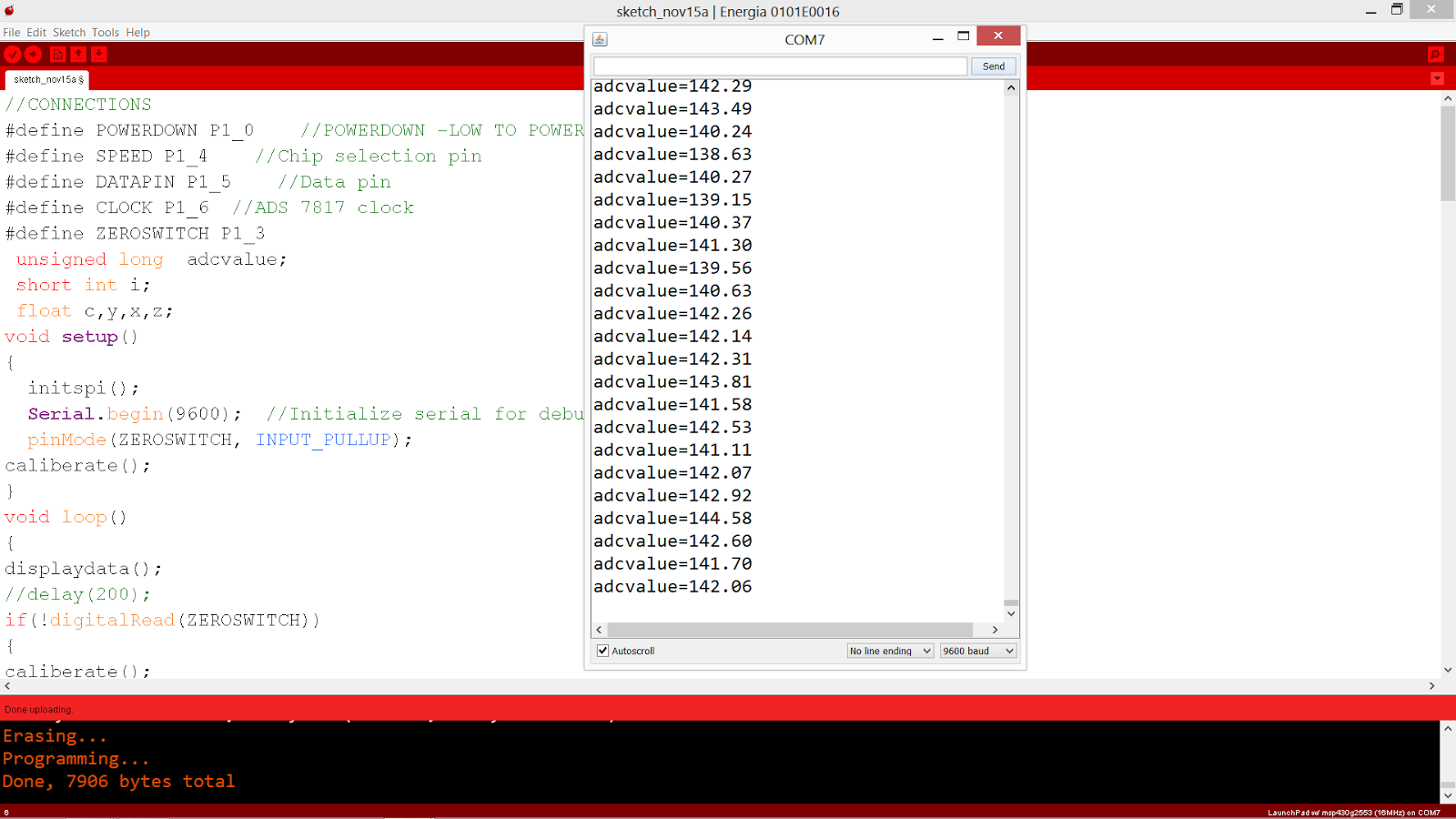
OUTPUT DATA SCREEN SHOT

PROGRAM
//CONNECTIONS
#define POWERDOWN P1_0 //POWERDOWN -LOW TO POWER DOWN
#define SPEED P1_4 //Chip selection pin
#define DATAPIN P1_5 //Data pin
#define CLOCK P1_6 //ADS 7817 clock
#define ZEROSWITCH P1_3
unsigned long adcvalue;
short int i;
float c,y,x,z;
void setup()
{
initspi();
Serial.begin(9600); //Initialize serial for debugging
pinMode(ZEROSWITCH, INPUT_PULLUP);
caliberate();
}
void loop()
{
displaydata();
//delay(200);
if(!digitalRead(ZEROSWITCH))
{
caliberate();
//float c=y;
}
}
void readADS1231(void)
{
adcvalue=0;
//digitalWrite(POWERDOWN, HIGH); //POWER ON
while(digitalRead(DATAPIN));//WAIT UNTIL DATA IS READY
//24-->21
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X800000;} //24
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X400000;}//23
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X200000;}//22
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X100000;}//21
//20-->17
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X80000;} //20
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X40000;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X20000;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X10000;}//17
//16-->13
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X8000;} //16
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X4000;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X2000;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X1000;}//13
//12-->9
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X800;} //12
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X400;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X200;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X100;}//9
//8-->5
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X80;} //8
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X40;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X20;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X10;}//5
//4-->1
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X8;} //4
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X4;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X2;}//
clock ();
if(digitalRead(DATAPIN)){adcvalue=adcvalue+0X1;}//1
clock ();//TO PULL DATA READY TO HIGH STATE --PAGE No.14 ON ADS1231 DATASHEET
//
digitalWrite(CLOCK, LOW);
//digitalWrite(POWERDOWN, LOW);
}
void caliberate(void)
{
readADS1231();
c=(adcvalue/100.0);
Serial.print("caliber=");Serial.println(c);
}
void displaydata(void)
{
readADS1231();
z=(adcvalue/100.0);//100000
z=z-c;
readADS1231();
x=(adcvalue/100.0);//100000
x=x-c;
readADS1231();
y=(adcvalue/100.0);//100000
y=y-c;
y=(y+x+z)/3.0;
Serial.print("adcvalue=");Serial.println(y);
}
void clock (void)
{
digitalWrite(CLOCK, LOW);
digitalWrite(CLOCK, HIGH);
delayMicroseconds(10);
}
void initspi(void)
{
pinMode(POWERDOWN, OUTPUT);
pinMode(DATAPIN, INPUT);
pinMode(CLOCK, OUTPUT);
pinMode(SPEED, OUTPUT);
digitalWrite(POWERDOWN, HIGH); //0--> POWERDOWN(SLEEPING -NO CONVERSION) ,1-->WORKING MODE
digitalWrite(SPEED, 0);//0--> 10SPS ,1-->80SPS
digitalWrite(CLOCK, LOW);
}